多様体は局所座標を持っています。つうか、局所座標の集まりを備えた空間が多様体です。具体的な計算は、局所座標によって行います。この局所座標に関する丁寧な解説が意外に見当たらないので、ここで事例を中心に説明しましょう。
内容:
- 微分幾何・ベクトル解析における古式とモダン
- モニタールームの孤独な男
- 円周に対するチャートとアトラス
- アトラスの記述 プログラム風
- 反チャート: 反対方向のチャート
- 地球の地図帳
- 多様体の座標系とは何なのか
- 多様体は人造物か自然物か
- おわりに
微分幾何・ベクトル解析における古式とモダン
前置きのオシャベリをします。
タイトルに「モダン化」という言葉を使ってますが、微分幾何やベクトル解析のモダンな定式化とはどんなものでしょう。いろんな観点/意見があるでしょうが、僕にとっての“モダンな感じ”とは次のようなものです。
一般化線形代数とは、体上のベクトル空間だけでなく、可換環上の加群も扱う線形代数の意味で言ってます*1。
古典的 -- いや、「古き良き」というよりは、単に古いだけかも知れないので古式と呼ぶことにします*2 -- 古式な微分幾何・ベクトル解析でやることは、座標を使って、たくさんの添字が付いた記号計算を頑張ることです。モダンな定式化では、できるだけ座標なしで議論しようとします。
古式スタイル*3とモダンスタイルでは、座標に対する態度が随分と違います。古式スタイルでは、座標の向こうにある実体をあまり意識しません。モダンスタイルでは、実体のほうをなるべく直接的に捉えようとします。
モダンなスタイルであっても、座標を使った計算をなしで済ませることはできません。古式スタイルとモダンスタイルを結びつけるのも、座標という概念です。そこでこの記事では、多様体上の座標系(局所座標の集まり)を主題的に扱います。
モニタールームの孤独な男
多様体上の座標系とはどんなものか? その“感じ”を伝える例え話をします -- この節もオシャベリですね。オシャベリに興味がない方はこの節を飛ばしてください。
とある建物に100台の監視カメラが設置されていて、これらのカメラ群に死角はなく、建物内のあらゆることを監視できるとします。モニタールームには、100面のディスプレイがあり、ひとりの男がディスプレイ群を眺めています。

彼は、建物内の諸々をディスプレイごしに完全に把握できます。彼はこう考えます、「ここにいれば、全てがわかるんだ。ボクは、外に出ていく必要なんてない」と。そのうち彼は、ディスプレイの先に現実があることを忘れてしまい、「100面のディスプレイこそが世界なんだ」と思い込み、モニタールームから出ることはありませんでした。
この「モニタールームの孤独な男」は、古式スタイルの微分幾何・ベクトル解析の比喩となるでしょう。例え話と幾何的概念の対応は次のようになります。
| 例え話 | 幾何的概念 | 記号的表現 |
|---|---|---|
| 建物 | 多様体 | M |
| 監視カメラとディスプレイ | チャート | φ:M⊇U→Rn |
| カメラの視野範囲 | 座標近傍 | U = ddef(φ) |
| ディスプレイ | ユークリッド空間内の開集合 | A = im(φ) |
| 監視システムの全体 | アトラス | A |
「チャート」は「局所座標」の別名、「アトラス」は「座標系」(いくつかの局所座標が集まったシステム)の別名です。古式スタイルは、チャート/アトラスを使った計算に集中します。
モダンスタイルを例え話で言うなら、モニタールームから外に出て、建物の状況を自分の目で見ようとする(別な)男です。第二の男の興味は、監視システムではなく、実際の建物とそこで起きていることです。とはいえ、監視システムを無視しているわけではありません*5。
円周に対するチャートとアトラス
実例を述べましょう。円周S1を次のように定義します。
- S1 := {(x, y)∈R2 | x2 + y2 = 1}
このS1は、2次元ユークリッド空間R2の部分多様体です。完全に抽象的に与えられた多様体とは事情が少し違いますが、部分多様体のほうが話が簡単なので、最初の例はこのS1にします。
前回導入したラムダ記法により、S1上の開集合を域とする関数〈写像 | map | mapping〉をいくつか定義します。関数定義に使われる変数名と関数の名前がかぶってもいいことに注意してください。
// 写像xは、平面の第一射影を、円周の上半分に制限したもの mapping x := λ(x, y)∈(S1| y > 0).(x : R) // 写像yは、平面の第ニ射影を、円周の右半分に制限したもの mapping y := λ(x, y)∈(S1| x > 0).(y : R)
この2つの関数 x, y を通常の写像と考えると:
- dom(x) = {(x, y)∈S1| y > 0} = {(x, y)∈R2| x2 + y2 = 1, y > 0}
- cod(x) = R
- dom(y) = {(x, y)∈S1| x > 0} = {(x, y)∈R2| x2 + y2 = 1, x > 0}
- cod(y) = R
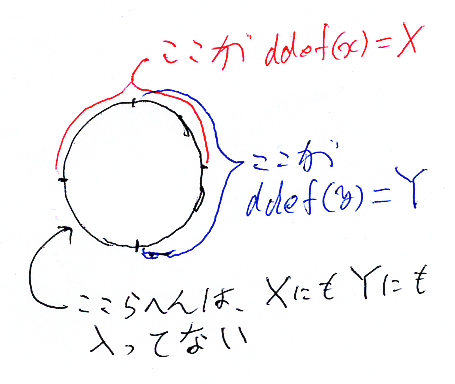
記述を簡潔にするために、dom(x) = X, dom(y) = Y と置きます。
さてここで、関数 x, y をS1上の部分写像だと思い直します。(部分写像については「古典的微分幾何・ベクトル解析のモダン化: ラムダ記法の利用 // 部分写像とそのプロファイル」を参照してください。)次のように再設定します。
- dom(x) = S1
- ddef(x) = X
- cod(x) = R
つまり、部分写像としてのプロファイルは:
- x:S1⊇X→R
同様に、yも再設定します。
- dom(y) = S1
- ddef(y) = Y
- cod(y) = R
- y:S1⊇Y→R
一般に、fがS1のチャート〈chart | 海図 | 地図〉だとは、
- fは、S1からRへの部分写像である。
- fの定義域は、S1の開集合である。
- fは、その定義域 ddef(f) と像 im(f) (Rの部分集合)のあいだの位相同型を導く。
- fは、C∞(ddef(f)) と C∞(im(f)) のあいだの可換環同型を導く。
4番目の条件はいずれ述べる(予定な)ので今は気にしなくていいです。S1のような、Rnの部分多様体に限って言えば、fがなめらか(無限回微分可能)ならば4番目の条件は満たされます。
S1上の部分写像だと再設定したx, yは、上記の条件を満たすので、どちらもS1のチャートになっています。チャートは、S1の一部分をR内に同型に写します。
S1のチャートの集まりが、次の条件を満たすとき、S1のアトラス〈atlas | 海図帳 | 地図帳〉と呼びます。
- 各チャートの定義域をすべて寄せ集めると(合併すると)S1になる。
{x, y} はアトラスになっていません。なぜなら、ddef(x)∪ddef(y) = X∪Y がS1とは違うからです。次節でS1のアトラスを作ってみます。
アトラスの記述 プログラム風
S1のアトラスを記述するために、プログラミング言語っぽい構文を使います。プログラミング言語は機械との対話のための言語で、「空気読めよ方式」が通用しないので、曖昧だったものを明確化するには好都合なのです。
space S1 := {(x, y)∈R2 | x2 + y2 = 1}
atlas for S1 {
// 上側半円に対するチャート
chart x := λ(x, y)∈(S1| y > 0).(x : R)
// 右側半円に対するチャート
chart y := λ(x, y)∈(S1| x > 0).(y : R)
// 下側半円に対するチャート
chart x' := λ(x, y)∈(S1| y < 0).(x : R)
// 左側半円に対するチャート
chart y' := λ(x, y)∈(S1| x < 0).(y : R)
}
最初の1行は、念のために、円周S1の定義を再掲しています。行頭のspaceは、「空間を定義するよ」という符丁です。単なる集合ではなくて、常に位相空間を定義するので"space"としました。
atlas for S1 { ... } の部分がS1のアトラスの記述です。アトラスはチャートの集まりなので、アトラス・ブロック('{'と'}'のあいだ)には、チャートが並びます。チャートの定義(名付け)は写像の定義(名付け)と同じです。行頭のchartが「この写像はチャートだよ」と主張しています。
上記のコードは、S1に対する多様体構造記述コードになります。もし、多様体構造記述コードをチェックするソフトウェア(多様体コンパイラ)があるなら、chartと宣言された写像がほんとにチャートになっているのか、atlasと宣言されたチャートの集まりがほんとにアトラスになっているのか等をチェックすることでしょう。欲しいなー、そういう多様体コンパイラ。
残念ながら、多様体コンパイラは現存しないので、みなさんの目視・手動で次を確認してください。
- 各チャートは、S1からRへの部分写像になってますか?
- 各チャートの定義域は、S1の開集合ですか?
- 各チャートは、その定義域と像のあいだの位相同型を与えてますか?
- 各チャートは、なめらか(無限回微分可能)な写像ですか?
- 各チャートの定義域をすべて寄せ集めると、S1全体になりますか?
上記コードにはアトラスがひとつしかないので、アトラスに名前を付けてませんが、同じ位相空間/多様体に複数のアトラスを考えることもあります。そのときは、アトラスに名前を付けて区別します。
反チャート: 反対方向のチャート
多様体Mのチャートは、多様体Mからユークリッド空間Rnへの部分写像です。逆に、ユークリッド空間Rnから多様体Mへの部分写像で、適当な条件を満たすものを反チャート〈opposite chart〉と呼びましょう。チャートと反チャートはしばしば混同されますが、これはキッチリと区別しましょう。
アトラスは反チャートの集まりとして構成してもいいとします。前節とは別な、S1のアトラスを定義します。反チャートは、キーワードopchart(opposite chartから)を使って定義します。次のアトラスは反チャートから構成されます。
space S1 := {(x, y)∈R2 | x2 + y2 = 1}
atlas for S1 {
// (1, 0)を除いた部分に対する反チャート
opchart p := λθ∈(R| 0 < θ < 2π).(
x := cos(θ),
y := sin(θ)
: (x, y)∈S1)
// (-1, 0)を除いた部分に対する反チャート
opchart q := λφ∈(R| π < φ < 3π).(
x := cos(φ),
y := sin(φ)
: (x, y)∈S1)
}
もうお分かりだと思いますが、gがS1の反チャートである条件は次のとおりです。
- gは、RからS1への部分写像である。
- gの定義域は、Rの開集合である。
- gは、その定義域 ddef(g) と像 im(g) (S1の部分集合)のあいだの位相同型を導く。
- gは、C∞(ddef(f)) と C∞(im(f)) のあいだの可換環同型を導く。(今は気にしなくていいです。)
アトラスの構成は、チャートだけ/反チャートだけに拘る理由はないので、チャート/反チャート混合型も許します。次は、チャートと反チャートを混ぜて作ったアトラスの例です。
space S1 := {(x, y)∈R2 | x2 + y2 = 1}
atlas for S1 {
// 右側半円に対するチャート
chart y := λ(x, y)∈(S1| x > 0).(y : R)
// (1, 0)を除いた部分に対する反チャート
opchart p := λθ∈(R| 0 < θ < 2π).(
x := cos(θ),
y := sin(θ)
: (x, y)∈S1)
}
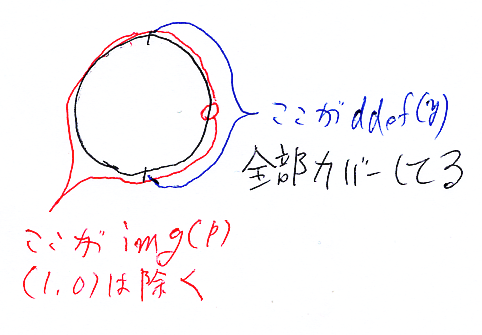
[追記 date="翌日"]あれ。写像fの像〈image〉を本文内では im(f) 、上の手描きの絵内では img(f) 使ってるな。こんな乱れはよくあることなんで、特に直しません。[/追記]
アトラスにはチャート/反チャートのどちらも含めてもいいので、アトラスの条件は次のように変わります。
- 所属しているチャートの定義域と、反チャートの像をすべて寄せ集めると(合併すると)S1になる。
地球の地図帳
チャート、反チャート、アトラスの概念は、もちろんS1以外でも通用します。一般の場合の定義を完全に述べるのはけっこう手間がかかる(位相空間に関する準備などがある)ので、後回しにします。S1以外の例を見てみます。
S1の次元を上げた例で、R3内の球面S2です。球面S2を地球に見立てましょう。そう、「チャート」「アトラス」の語源となった事例です。

経度θ、緯度φをパラメータとするパラメータ表示(つまり反チャート)で、ほぼ地球を覆〈おお〉えますが、グリニッジを通って北極から南極に至る子午線(大円の半分)*7はカバーできません。反チャートは定義域が開集合である単射という条件があるので、無理に子午線をカバーしようとすると、反チャートじゃなくなります。
パラメータ表示〈反チャート〉から漏れてしまう半円を覆うには、北半球と南半球のチャートが必要です。これでもなお、アフリカ・ギニア湾にある“赤道とグリニッジ子午線の交点”が漏れるので、アフリカ/ヨーロッパを含む半球に対するチャートも追加します。
以下が、地球とみなしたS2のアトラス〈地図帳〉です。
// 球面=地球
space S2 := {(x, y, z)∈R3| x2 + y2 + z2 = 1}
atlas for S2 {
// 経度緯度方式の反チャート(パラメータ表示)
opchart p := λ(θ, φ)∈(R2| -π<θ<π, -π/2<φ<π/2).(
x := cos(φ)cos(θ),
y := cos(φ)sin(θ),
z := sin(φ)
: (x, y, z)∈S2)
// 北半球をx-y平面に射影するチャート
chart n := λ(x, y, z)∈(S2| z > 0).(
x := x
y := y
: (x, y)∈R2)
// 南半球をx-y平面に射影するチャート
chart s := λ(x, y, z)∈(S2| z < 0).(
x := x
y := y
: (x, y)∈R2)
// グリニッジ子午線と赤道の交点(ギニア湾)の側の
// 半球をy-z平面に射影するチャート
chart a := λ(x, y, z)∈(S2| x > 0).(
y := y
z := z
: (y, z)∈R2)
}
多様体の座標系とは何なのか
この節では、部分写像の概念が必須です(部分写像については「古典的微分幾何・ベクトル解析のモダン化: ラムダ記法の利用 // 部分写像とそのプロファイル」を参照してください)。部分写像のプロファイルを f:X⊇A→Y のように書きますが、定義域Aを省略して f:X⊇→Y のようにも書きます。f:X⊇→Y に対して:
- dom(f) = X
- ddef(f) = {x∈X| f(x)が定義されている}
- im(f) = {y∈Y| x∈ddef(f) が存在して、y = f(x) と書ける}
- cod(f) = Y
以上の概念と書き方はしっかり確認してください。
さて、Mを多様体とします。多様体〈manifold〉とは、我々が扱う図形(幾何的対象物)です。なめらかな多様体〈smooth manifold〉しか考えません。「なめらか」とは、とんがった所や角張った所がなくて、どこを触ってもツルンとした手触りであることです。この「なめらかさ」を、「微分が何回でも好きなだけ出来る」という表現で定義します。
Mのチャートは、φ:M⊇→Rn という部分写像で、適当な条件を満たすものでした。局所座標〈local coordinate | local coordinate system〉はチャートと同義語です。関連する用語を並べてみると:
- φの定義域 ddef(φ) を、座標近傍〈coordinate neighborhood〉と呼ぶ。
- φの余域 cod(φ) = Rn を座標空間〈coordinate space〉と呼ぶことがある。僕(檜山)は言いませんが。
- φを座標写像〈coordinate map〉と呼ぶことがある。僕は言いませんが。
- φに、Rnの第i射影を結合〈合成〉した πi
φ を座標関数〈coordinate function〉、座標成分〈coordinate component〉と呼ぶことがある。僕は、座標成分をたまに使うかな、たまに。
座標近傍の「近傍」は、「特定の点の近く」の意味ですが、特定の点がなくても近傍と言います。語感がイヤなら「座標開集合」とか呼べばいいんじゃないのかな。まー、座標まわりの用語法はゴチャゴチャしているので、僕はチャートをキチンと定義した上で、原則「チャート」だけを使うようにしています。その他の概念は、ddef(φ), dom(φ), πiφ, im(φ) などと書けばいいのです。
それとですね、反チャートのほうを局所座標と呼ぶ人もいます。チャートと反チャートの両方とも局所座標とする人もいるでしょう。そもそも、チャートと反チャートの区別が付かずにゴッチャになっている人もいそうです。
反チャートは、ψ:Rn→M という方向の部分写像です。反チャートのことを、よくパラメータ表示〈parameterization〉と呼びます。反チャートの定義域 ddef(ψ)⊆Rn はパラメータ領域〈parameter domain/region/space〉と呼びます。
チャート φ:M⊇→Rn の方向を反対にすると反チャート Rn⊇→M が出来そうです。同じく、反チャート ψ:Rn⊇→M の方向を反対にしてチャート M⊇→Rn が出来そうです。「方向を反対にする」を厳密に定義しましょう。
チャート φ:M⊇→Rn と、Rnの部分集合Bに対して、φの余域をBに制限した部分写像を φ|B とします。ただし、Bを自由には選べなくて、im(φ)⊆B のときに限り φ|B がwell-definedになります(「古典的微分幾何・ベクトル解析のモダン化: ラムダ記法の利用 // 出力制約」を参照してください)。im(φ)⊆im(φ) は自明に成立するので、φ|im(φ):M⊇→im(φ) は意味を持ちます。
φ:M⊇→Rn がチャートである条件に、「φ|im(φ)が可逆〈invertible〉である」があるので、普通の写像としての逆写像 (φ|im(φ))-1:im(φ)→ddef(φ) が作れます。さらに、包含関係 ddef(f)⊆M に伴う包含写像 inclddef(f),M:ddef(f)→M を後結合〈postcompose〉して、
- (φ|im(φ))-1;(inclddef(f),M) = (inclddef(φ),M)
が作れます。これを、φの反転〈converse〉と呼び、φ←と書くことにします。
- φ← := (inclddef(φ),M)
同様に、反チャート ψ:Rn⊇→M に対して、反転ψ←を定義できます。
- ψ← := (inclddef(ψ),Rn)
チャート/反チャートの条件に反転可能〈convertible〉であることが入っていたので、φ←, ψ← が作れるわけです。そして、次が成立します。
- φがMのチャートなら、反転φ←はMの反チャートである。
- ψがMの反チャートなら、反転ψ←はMのチャートである。
これにより、チャートと反チャートを対称的に扱ってよくなります。対称的に扱えることは、混同してゴッチャにしていいってことじゃないです。
多様体Mには、Mの全てのチャートからなる集合 Chart(M) と、Mの全ての反チャートからなる集合 OpChart(M) が付随します。チャート/反チャートを反転する操作を conv(-) := (-)← と置くと、convは、
- conv:(Chart(M)∪OpChart(M)) → (Chart(M)∪OpChart(M))
という自己写像〈endomorphism〉となり、conv;conv = convconv = id という性質(対合性〈involution property〉)を持ちます。convは、鏡に写すような操作なので、チャート/反チャートの空間が対称性を持つ、という言い方は的外れではありません。
多様体は人造物か自然物か
多様体は人間が作業して作り出すものでしょうか? それとも、概念世界に天然に存在しているものでしょうか?
- 人造物なら、我々はそれを作成する。
- 自然物なら、我々はそれを発見する。
どうだっていいじゃん -- うん、どうだっていいんですけどね。ただ、チャートやアトラスの定義に、多様体を人造物とみるか/自然物とみるかの違いが反映されている気もするんですよ。
もし人造物なら、ユークリッド空間Rnの開集合を素材にして、ペタペタ糊付け〈gluing〉して多様体を作り出す必要があります。この立場だと、アトラスは素材キットであり、糊付けがうまくいくように素材を選択して同梱する必要があります。変な素材を入れると糊付け/組み立てが失敗します。
一方、多様体が自然物なら、我々はそれを発見し観察するだけです。チャートやアトラスは、観測の手段であり素材キットではありません。観測のために適切なチャートを選択する必要はありますが、もともと多様体に備わっていたものなので、チャートどうしがうまく噛み合わない、なんてことは起こりません。
僕自身は、多様体は自然物だと思っています。そう信じてるわけじゃなくて、そう思ったほうが都合がよさそうだからです。多様体Mの開集合Uを任意に選ぶと、U上のなめらかな(実数値の)関数の集合 C∞(U) が決まります。「座標(チャートまたは反チャート)を考える前に“なめらか”もへったくれもないだろう」 -- いやっ、座標を入れる前から「なめらかさ」は自然界に存在しているのです。
我々人間が、座標(チャートまたは反チャート)を選ぶかどうかに無関係に、M上の各開集合Uに C∞(U) が決まっているなら、次の言明は意味を持ちます。
誘導された写像とは、f∈C∞(A) に対して、引き戻し (fρ)∈C∞(U) を対応させる写像です。φ:M⊇U→Rn がチャートであることは、φ|im(φ) が上記のρの性質を持つことになります。
もちろん、「座標(チャートまたは反チャート)以前に与えられる C∞(U) って何なんだよ、それ?」という疑問に答える必要があります。(今日は答えません、あしからず、いずれ書くかも。)
多様体は人造物だから糊付けして作るのだ、という立場なら、今言った難しい問題は回避できます。素材キットであるアトラスに同梱されたチャート達が整合的ならいいのです。整合性は、チャート(局所座標)のあいだの変換写像〈transition map〉達が、普通の意味でなめらか(無限回微分可能)であることだと定義できます。ここで変換写像とは:
アトラスのなかに反チャートが混じっていても、変換写像とアトラスの整合性は同様に定義できます。
おわりに
前節で述べた「多様体は人造物か自然物か」の議論は、哲学や信仰の話ではありません。そうではなくて、多様体を定式化する際の指導原理の話です。「多様体は自然物だ」説が、どちらかというと、冒頭(最初の節)のモダンな定式化と相性がいいように思えます。
「多様体は自然物だ」説に基づいたチャート/アトラスをちゃんと定義して、「多様体は人造物だ」説に基づくたチャート/アトラスと同値であることを示すのは、また今度にします。
それと、円周S1と球面S2以外のチャート/アトラスの例、ユークリッド空間Rnの部分多様体ではない多様体のチャート/アトラスの例も提示したいんですけど、それもまたいつか。
*1:多様体Mまたはその開集合U上のなめらかな(無限回微分可能な)関数の全体 C∞(M), C∞(U) は、可換環だし、ベクトル場や微分形式(の場)は、関数の可換環上の加群になっています。
*2:[追記]後に、「古式」は「因習的」に変更しました。「古典的微分幾何・ベクトル解析のモダン化: 因習的微分幾何とその構造」参照。[/追記]
*3:「古式スタイル」って「馬から落馬」な言い方だけど、使い続けます。
*4:画像: http://www.ntv.co.jp/marumie/onair/120130/120130_02.html より
*5:抽象的に多様体を定義する試みのなかには、ほんとに座標を一切使わないものもあります。そこまでいくと、ちょとやり過ぎかな、と思います。